AMORph
Angehender Modder
Hallo zusammen,
hier möchte ich euch gerne auf dem Weg zu meiner Smarten Hyperfire mitnehmen.
Dies hier wird eine längere Reise da viel zu tun ist.

Aus meiner Standart Hyperfire habe ich begonnen, alle Mechanischen Triggersperren zu entfernen.
Hier die Sperre für den Abzug von dem RevTrigger:

Diese habe ich komplett entfernt und den Trigger mit einer AR Feder von einer Maverick REV-6 aus der Bastelkiste federnd wieder eingebaut.


Weiter ging es mit der Sperre des Abzugs durch das Magazin,
hier musste ich nur folgendes teil entfernen und wieder zusammenbauen.





Nachdem nun die 2 Mechanischen Sperren ausgebaut waren, habe ich die Motoren ausgebaut und von den Schaltern die Position und Kabelfarben notiert.
(Im Späteren verlauf auch die ein und ausgänge am Arduino hinzugefügt.

Rev Trigger
D2
schwarz
blau
gelb/schwarz
Abzug Trigger
D3
schwarz
grau
grau
Magazin erkennung
D4
schwarz
blau
gelb
Jam door
D5
braun
lila
gelb
flywheel motor
D6
rot
braun
belt motor
D7
schwarz
rot
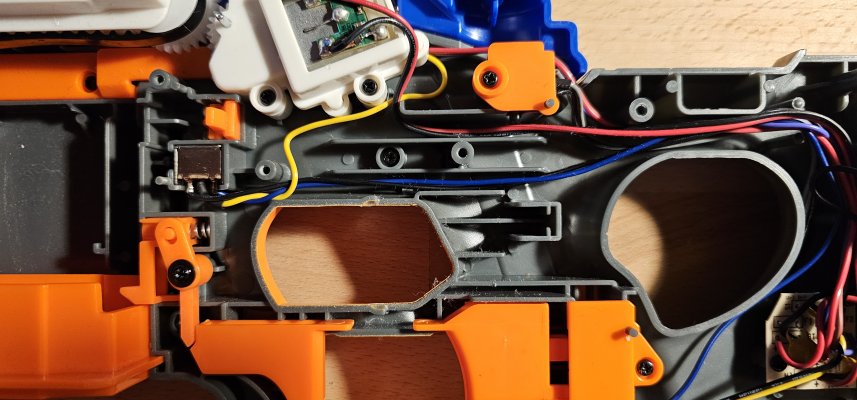
Alle Kabel zu den Steckern habe ich von der Platine abgeschnitten und da ich Lötfaul bin in einen Stecker gepinnt

Danach alle Taster im eingebauten Zustand mit dem Multimeter durchgepiepst. Effektiv habe ich micht dann dazu entschieden bei allen Tastern die mitlere und untere Ader zu nutzen.

Von jedem Taster gehen nun zwei Kabel zum Arduino, jeweils eins davon wird an einen Pin vom Arduino und das andere an Masse angeschlossen.
Dies ist der einfachste Weg, da der Arduino den ich verwende eingebaute Pullupwiederstände hat.
Somit konnte das Coden beginnen und etwa 2 1/2 Stunden Coden später. Temporär habe ich die Motoren über ein Relaismodul mit der Batterie verbunden. Wurde die Funktion des Blasters wieder hergestellt.

Den Code für den Arduino werde ich jeweils als *.txt hier anhängen. (Achtung im Code steckt schon der ein oder andere Leak)
Damit sind 2 Bastelabende vorbei. Heute feile ich vieleicht noch etwas am Code.
Rein Theoretisch lässt sich in der Konfiguration schon ein Einzelschuss / einstelbare Darts Burst Schussanzahl / autofire Codieren. Dies erspare ich mich zum jetzigen Zeitpunkt, weil ich dafür eine Fortgeschrittenere Regelung in Planung habe.
Ich selbst sehe den aktuellen Projektstand als gutes Grundgerüst um mit erweiternden Funktionen zu beginnen. Dafür muss ich nun mir den besten Weg aussuchen und Bauteile bestellen.
Zur Zeit geht es um:
-Einen 3d gedruckten Flywheel Cage sowie Flywheels
-Andere Motoren und ESC´s
-Überlegen ob ich das Förderband über einen ESC oder einen Schrittmotor betreibe.
Da hier die Lieferzeiten eine Rolle spielen. Möchte ich euch gern um Gedult bitten.
Wenn ihr möchtet Poste ich auch gerne Bezeichnungen und Links zu den komponenten die ich Verbaut habe.
Natürlich nehme ich alle Fragen/Kommentare/Kritik/Hinweise oder ein geil, das hätte ich gern eingebaut, sehr ernst und bitte daraum nicht lange hinterm Berg zu halten, sondern reichlich davon gebrauch zu machen und es mich Wissen zu lassen.
hier möchte ich euch gerne auf dem Weg zu meiner Smarten Hyperfire mitnehmen.
Dies hier wird eine längere Reise da viel zu tun ist.
Aus meiner Standart Hyperfire habe ich begonnen, alle Mechanischen Triggersperren zu entfernen.
Hier die Sperre für den Abzug von dem RevTrigger:
Diese habe ich komplett entfernt und den Trigger mit einer AR Feder von einer Maverick REV-6 aus der Bastelkiste federnd wieder eingebaut.
Weiter ging es mit der Sperre des Abzugs durch das Magazin,
hier musste ich nur folgendes teil entfernen und wieder zusammenbauen.
Nachdem nun die 2 Mechanischen Sperren ausgebaut waren, habe ich die Motoren ausgebaut und von den Schaltern die Position und Kabelfarben notiert.
(Im Späteren verlauf auch die ein und ausgänge am Arduino hinzugefügt.
Rev Trigger
D2
schwarz
blau
gelb/schwarz
Abzug Trigger
D3
schwarz
grau
grau
Magazin erkennung
D4
schwarz
blau
gelb
Jam door
D5
braun
lila
gelb
flywheel motor
D6
rot
braun
belt motor
D7
schwarz
rot
Alle Kabel zu den Steckern habe ich von der Platine abgeschnitten und da ich Lötfaul bin in einen Stecker gepinnt
Danach alle Taster im eingebauten Zustand mit dem Multimeter durchgepiepst. Effektiv habe ich micht dann dazu entschieden bei allen Tastern die mitlere und untere Ader zu nutzen.
Von jedem Taster gehen nun zwei Kabel zum Arduino, jeweils eins davon wird an einen Pin vom Arduino und das andere an Masse angeschlossen.
Dies ist der einfachste Weg, da der Arduino den ich verwende eingebaute Pullupwiederstände hat.
Somit konnte das Coden beginnen und etwa 2 1/2 Stunden Coden später. Temporär habe ich die Motoren über ein Relaismodul mit der Batterie verbunden. Wurde die Funktion des Blasters wieder hergestellt.
Den Code für den Arduino werde ich jeweils als *.txt hier anhängen. (Achtung im Code steckt schon der ein oder andere Leak)
Damit sind 2 Bastelabende vorbei. Heute feile ich vieleicht noch etwas am Code.
Rein Theoretisch lässt sich in der Konfiguration schon ein Einzelschuss / einstelbare Darts Burst Schussanzahl / autofire Codieren. Dies erspare ich mich zum jetzigen Zeitpunkt, weil ich dafür eine Fortgeschrittenere Regelung in Planung habe.
Ich selbst sehe den aktuellen Projektstand als gutes Grundgerüst um mit erweiternden Funktionen zu beginnen. Dafür muss ich nun mir den besten Weg aussuchen und Bauteile bestellen.
Zur Zeit geht es um:
-Einen 3d gedruckten Flywheel Cage sowie Flywheels
-Andere Motoren und ESC´s
-Überlegen ob ich das Förderband über einen ESC oder einen Schrittmotor betreibe.
Da hier die Lieferzeiten eine Rolle spielen. Möchte ich euch gern um Gedult bitten.
Wenn ihr möchtet Poste ich auch gerne Bezeichnungen und Links zu den komponenten die ich Verbaut habe.
Natürlich nehme ich alle Fragen/Kommentare/Kritik/Hinweise oder ein geil, das hätte ich gern eingebaut, sehr ernst und bitte daraum nicht lange hinterm Berg zu halten, sondern reichlich davon gebrauch zu machen und es mich Wissen zu lassen.
Anhänge
Zuletzt bearbeitet:

")






